Next: 11.1.5 the COMPARE command Up: 11.1 The basic visualization commands Previous: 11.1.3 the INSPECT_3D command Contents Index
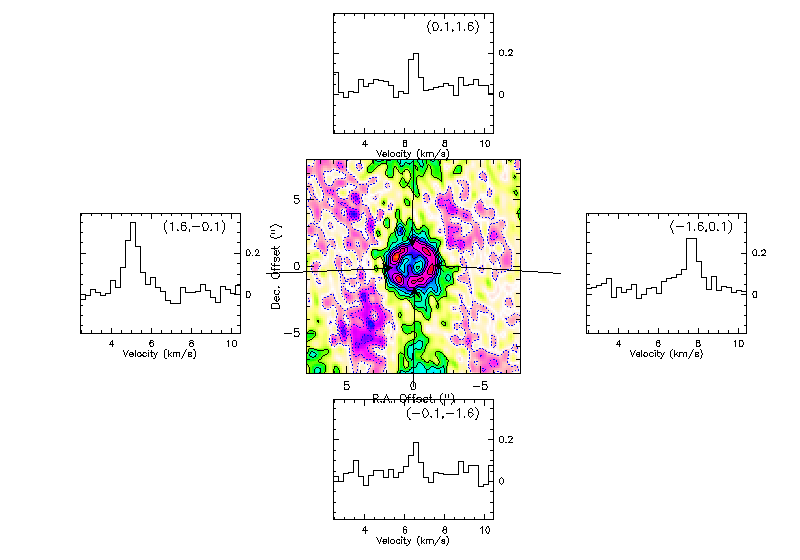
The latest alternative to SHOW, VIEW or INSPECT_3D is the EXPLORE command, which presents spectra extracted from a datacube around an image of one velocity channel or of the velocity integrated area.